【机器人学】第一次作业
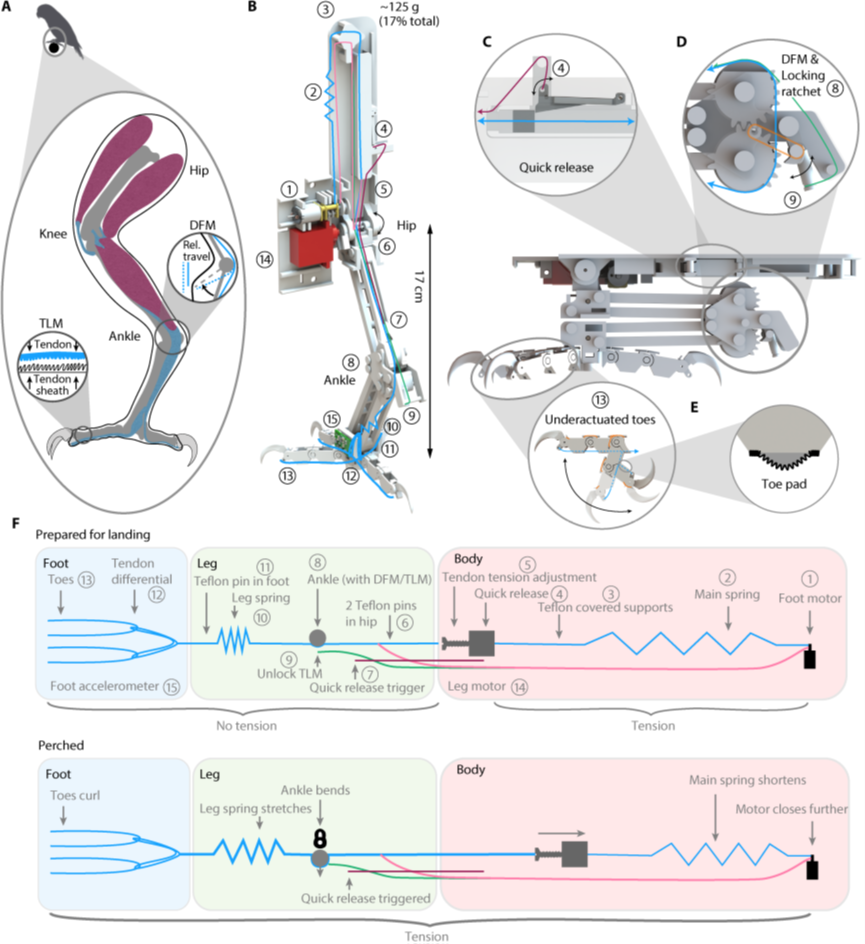
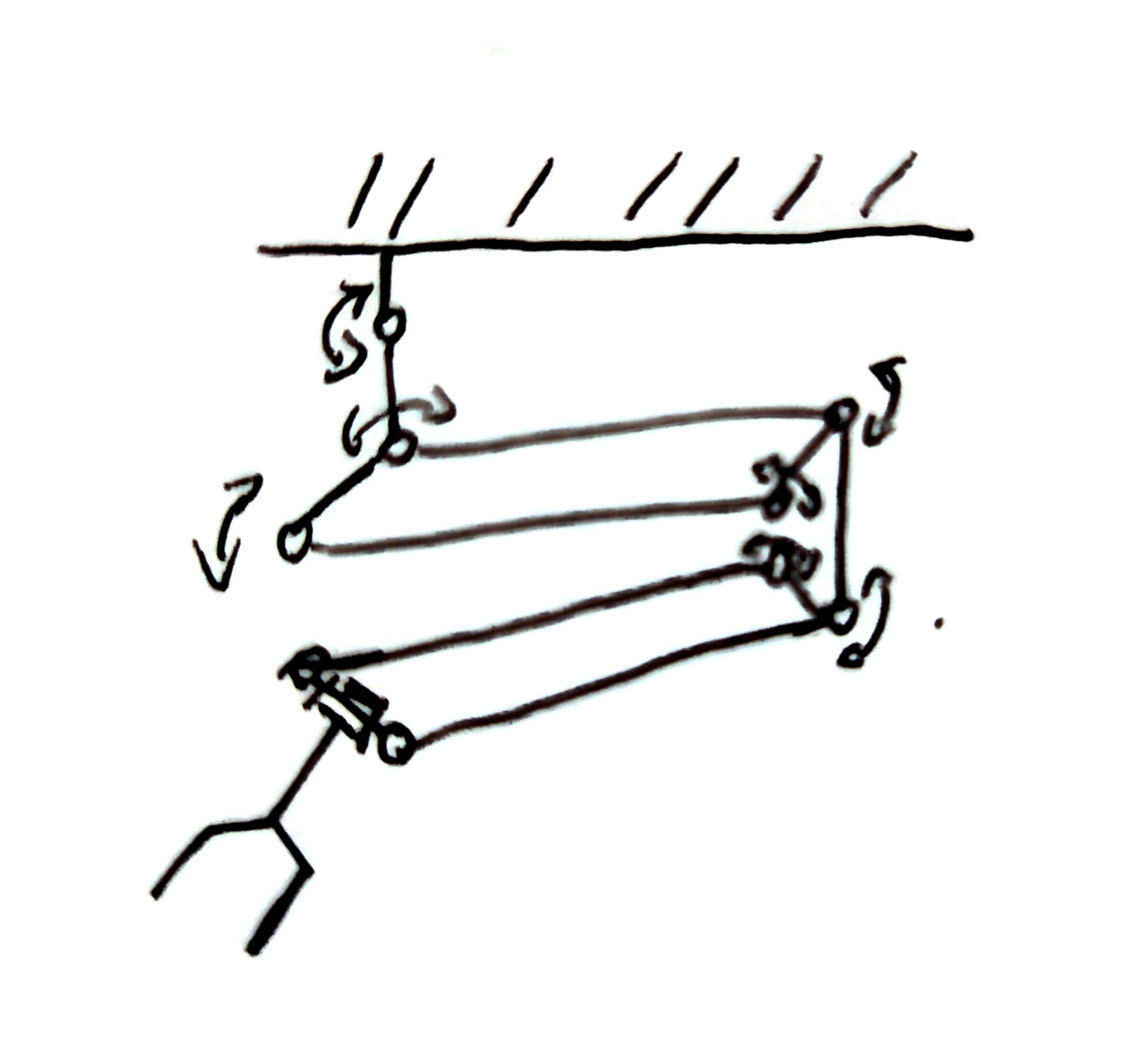
图2为脚部机构的简图,仅含其中一根爪子。
由图1中(B)可知,该仿生机器人的腿是串联机构,属于通用多关节型,工作范围大,结构复杂,定位精度高。机器人的腿由一个上下平行的机构组成,以平行四边形方式折叠。弯曲腿趾的肌腱穿过腿部,并串联了一个弹簧。
平面机构自由度计算公式
式中:
由上图1中(E)可知,活动构件由爪子、长杆以及连接件等组成,共15个;低副有15个;高副有1个。所以应用计算公式:
所以该机构自由度为14。
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 cpx的窝!
