【机器人学】第二次作业
为使公式能正常渲染,对部分细节有所调整,原文可点击附件查阅。
第三章课后习题
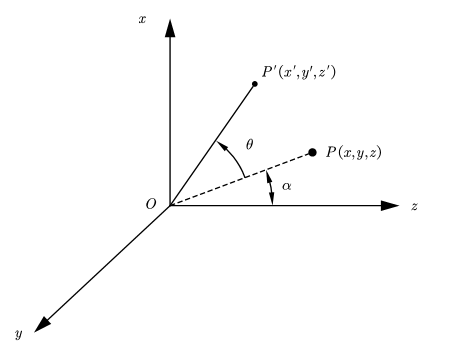
1.推导绕参考坐标系Y轴纯旋转的矩阵表示。
证明:
如图1所示,XYZ坐标系中,\(\overrightarrow{OP}\) 旋转\(\theta\)角到\(\overrightarrow{OP^{\prime}}\)的位置,根据三角函数关系,可以列出\(\overrightarrow{OP}\) 与\(\overrightarrow{OP^{\prime}}\)的坐标表示形式: \[ \begin{cases} z^{\prime}=\left| OP \right|\cdot \cos \left( \alpha +\theta \right) =\left| OP \right|\cdot \left( \cos \alpha \cdot \cos \theta -\sin \alpha \cdot \sin \theta \right) =z\cdot \cos \theta -x\cdot \sin \theta\\ y^{\prime}=y\\ x^{\prime}=\left| OP \right|\cdot \sin \left( \alpha +\theta \right) =\left| OP \right|\cdot \left( \cos \alpha \cdot \sin \theta +\sin \alpha \cdot \cos \theta \right) =z\cdot \sin \theta +x\cdot \cos \theta\\ \end{cases} \] 用矩阵形式重新表示为: \[ \left[ \begin{array}{c} z^{\prime}\\ y^{\prime}\\ x^{\prime}\\ \end{array} \right] =\left[ \begin{matrix} \cos \theta& 0& -\sin \theta\\ 0& 1& 0\\ \sin \theta& 0& \cos \theta\\ \end{matrix} \right] \cdot \left[ \begin{array}{c} z\\ y\\ x\\ \end{array} \right] \] 整理得: \[ \left[ \begin{array}{c} x^{\prime}\\ y^{\prime}\\ z^{\prime}\\ \end{array} \right] =\left[ \begin{matrix} \cos \theta& 0& \sin \theta\\ 0& 1& 0\\ -\sin \theta& 0& \cos \theta\\ \end{matrix} \right] \cdot \left[ \begin{array}{c} x\\ y\\ z\\ \end{array} \right] \] 证毕.
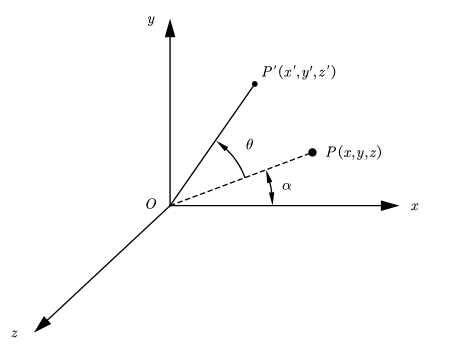
2. 推导绕参考坐标系Z轴纯旋转的矩阵表示。
证明:
如图2所示,XYZ坐标系中,\(\overrightarrow{OP}\) 旋转\(\theta\)角到\(\overrightarrow{OP^{\prime}}\)的位置,根据三角函数关系,可以列出\(\overrightarrow{OP}\) 与\(\overrightarrow{OP^{\prime}}\)的坐标表示形式: \[ \begin{cases} x^{\prime}=\left| OP \right|\cdot \cos \left( \alpha +\theta \right) =\left| OP \right|\cdot \left( \cos \alpha \cdot \cos \theta -\sin \alpha \cdot \sin \theta \right) =x\cdot \cos \theta -y\cdot \sin \theta\\ y^{\prime}=\left| OP \right|\cdot \sin \left( \alpha +\theta \right) =\left| OP \right|\cdot \left( \cos \alpha \cdot \sin \theta +\sin \alpha \cdot \cos \theta \right) =x\cdot \sin \theta +y\cdot \cos \theta\\ z^{\prime}=z\\ \end{cases} \] 用矩阵形式重新表示为: \[ \left[ \begin{array}{c} x^{\prime}\\ y^{\prime}\\ z^{\prime}\\ \end{array} \right] =\left[ \begin{matrix} \cos \theta& -\sin \theta& 0\\ \sin \theta& \cos \theta& 0\\ 0& 0& 1\\ \end{matrix} \right] \cdot \left[ \begin{array}{c} x\\ y\\ z\\ \end{array} \right] \] 证毕.
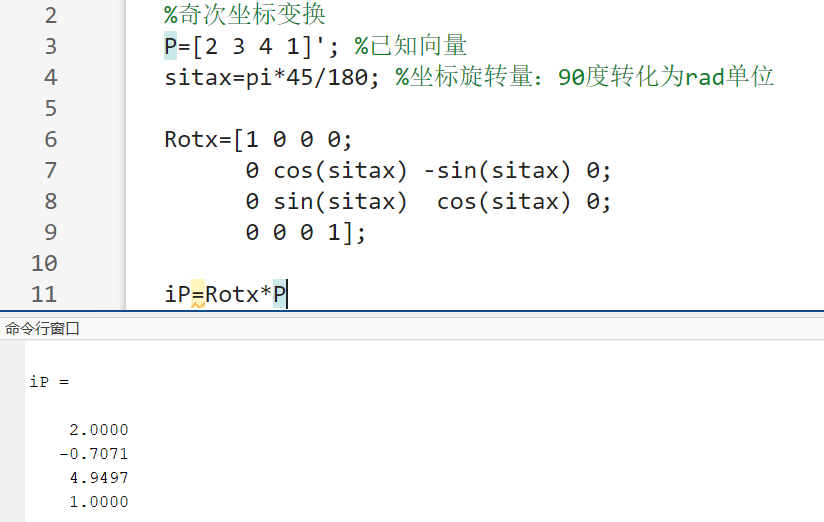
3.求点\(P\left( 2,3,4 \right) ^T\)绕参考坐标系x轴旋转45度后,相对参考坐标的坐标。并给出Matlab程序及程序运行结果。
解: \[ P^{\prime}=\mathrm{Rot}\left( x,45^\circ \right) \cdot P=\left[ \begin{matrix} 1& 0& 0& 0\\ 0& \cos 45^\circ& -\sin 45^\circ& 0\\ 0& \sin 45^\circ& \cos 45^\circ& 0\\ 0& 0& 0& 1\\ \end{matrix} \right] \cdot \left[ \begin{array}{c} 2\\ 3\\ 4\\ 1\\ \end{array} \right] =\left[ \begin{array}{c} \begin{array}{c} 2\\ -\frac{\sqrt{2}}{2}\\ \frac{7\sqrt{2}}{2}\\ \end{array}\\ 1\\ \end{array} \right] \] Matlab程序:
1 | P=[2 3 4 1]'; |
程序运行结果如图3所示.
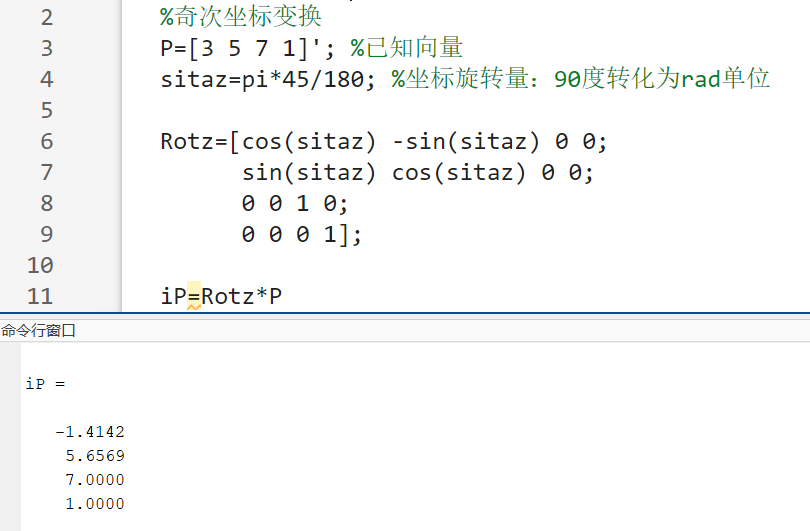
4.求点\(P\left( 3,5,7 \right) ^T\)绕参考坐标系z轴旋转45度后,相对参考坐标的坐标。并给出Matlab程序及程序运行结果。
解: \[ P^{\prime}=\mathrm{Rot}\left( z,45^\circ \right) \cdot P=\left[ \begin{matrix} \cos 45^\circ& -\sin 45^\circ& 0& 0\\ \sin 45^\circ& \cos 45^\circ& 0& 0\\ 0& 0& 1& 0\\ 0& 0& 0& 1\\ \end{matrix} \right] \cdot \left[ \begin{array}{c} 3\\ 5\\ 7\\ 1\\ \end{array} \right] =\left[ \begin{array}{c} \begin{array}{c} -\sqrt{2}\\ 4\sqrt{2}\\ 7\\ \end{array}\\ 1\\ \end{array} \right] \] Matlab程序:
1 | P=[3 5 7 1]'; |
程序运行结果如图4所示.
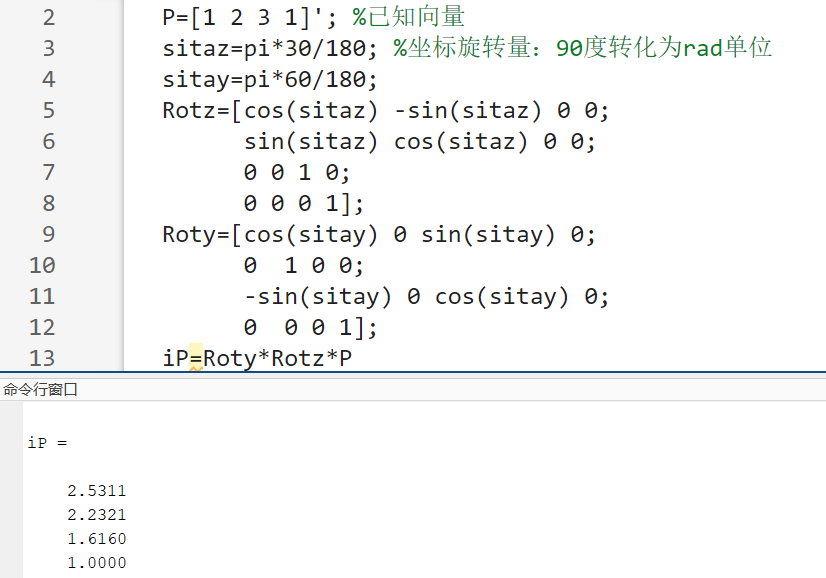
5.求点\(P\left( 1,2,3 \right) ^T\)绕参考坐标系z轴旋转30度后,再绕y轴旋转60度后,相对参考坐标的新位置。并给出Matlab程序及程序运行结果。
解: \[ \begin{aligned} P^{\prime}&=\mathrm{Rot}\left( y,60^\circ \right) \cdot \mathrm{Rot}\left( z,30^\circ \right) \cdot P\\&=\left[ \begin{matrix} \cos 60^\circ& 0& \sin 60^\circ& 0\\ 0& 1& 0& 0\\ -\sin 60^\circ& 0& \cos 60^\circ& 0\\ 0& 0& 0& 1\\ \end{matrix} \right] \cdot \left[ \begin{matrix} \cos 30^\circ& -\sin 30^\circ& 0& 0\\ \sin 30^\circ& \cos 30^\circ& 0& 0\\ 0& 0& 1& 0\\ 0& 0& 0& 1\\ \end{matrix} \right] \cdot \left[ \begin{array}{c} \begin{array}{c} 1\\ 2\\ 3\\ \end{array}\\ 1\\ \end{array} \right] \\&=\left[ \begin{array}{c} \begin{array}{c} \frac{7\sqrt{3}-2}{4}\\ \frac{1+2\sqrt{3}}{2}\\ \frac{3+2\sqrt{3}}{4}\\ \end{array}\\ 1\\ \end{array} \right] \end{aligned} \] Matlab程序:
1 | P=[1 2 3 1]'; |
程序运行结果如图5所示.
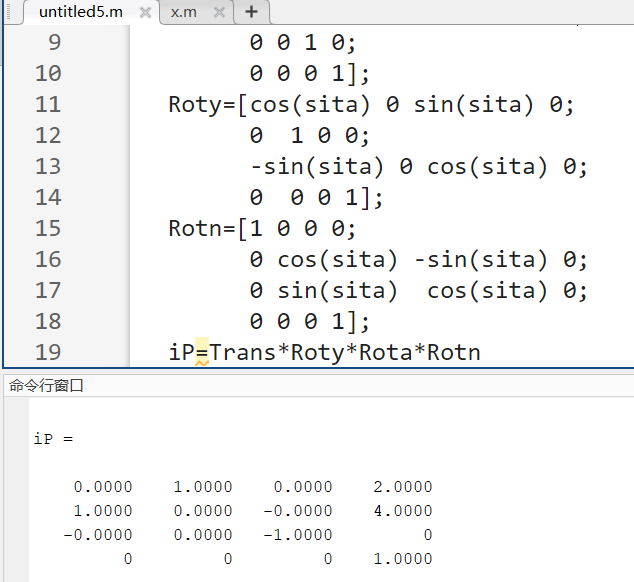
6.坐标系{B}$( n,o,a) $绕a轴旋转90度,再绕参考坐标系{i} $( x,y,z ) $的y轴旋转90度,然后沿着x轴和y轴分别移动2和4,再绕n轴旋转90度,求出该坐标系在参考坐标系内的新位姿。并给出Matlab程序及程序运行结果。
解: \[ \begin{aligned} P&=\mathrm{Trans}\left( 2,4,0 \right) \cdot \mathrm{Rot}\left( y,90^\circ \right) \cdot \mathrm{Rot}\left( a,90^\circ \right) \cdot \mathrm{Rot}\left( n,90^\circ \right) \\ &=\left[ \begin{matrix} 1& 0& 0& 2\\ 0& 1& 0& 4\\ 0& 0& 1& 0\\ 0& 0& 0& 1\\ \end{matrix} \right] \cdot \left[ \begin{matrix} \cos 90^\circ& 0& \sin 90^\circ& 0\\ 0& 1& 0& 0\\ -\sin 90^\circ& 0& \cos 90^\circ& 0\\ 0& 0& 0& 1\\ \end{matrix} \right] \cdot \left[ \begin{matrix} \cos 90^\circ& -\sin 90^\circ& 0& 0\\ \sin 90^\circ& \cos 90^\circ& 0& 0\\ 0& 0& 1& 0\\ 0& 0& 0& 1\\ \end{matrix} \right] \cdot \left[ \begin{matrix} 1& 0& 0& 0\\ 0& \cos 90^\circ& -\sin 90^\circ& 0\\ 0& \sin 90^\circ& \cos 90^\circ& 0\\ 0& 0& 0& 1\\ \end{matrix} \right] \\ &=\left[ \begin{matrix} 0& 1& 0& 2\\ 1& 0& 0& 4\\ 0& 0& -1& 0\\ 0& 0& 0& 1\\ \end{matrix} \right] \end{aligned} \] Matlab程序:
1 | sita=pi*90/180; |
程序运行结果如图6所示.
7.圆柱坐标机器人包括两个平移运动和一个旋转运动,其顺序为:先沿x轴移动 \(r\),在绕z轴旋转\(\alpha\),最后沿z轴移动 \(l\),求圆柱坐标机器人的运动变换矩阵。
解: \[ \begin{aligned} P&=\mathrm{Trans}\left( 0,0,l \right) \cdot \mathrm{Rot}\left( z,\alpha \right) \cdot \mathrm{Trans}\left( r,0,0 \right) \\ &=\left[ \begin{matrix} 1& 0& 0& 0\\ 0& 1& 0& 0\\ 0& 0& 1& l\\ 0& 0& 0& 1\\ \end{matrix} \right] \cdot \left[ \begin{matrix} \cos \alpha& -\sin \alpha& 0& 0\\ \sin \alpha& \cos \alpha& 0& 0\\ 0& 0& 1& 0\\ 0& 0& 0& 1\\ \end{matrix} \right] \cdot \left[ \begin{matrix} 1& 0& 0& r\\ 0& 1& 0& 0\\ 0& 0& 1& 0\\ 0& 0& 0& 1\\ \end{matrix} \right] \end{aligned} \]
8.球坐标机器人包括一个平移运动和两个旋转运动,其顺序为:先沿z轴移动 \(r\),再绕y轴旋转 \(\beta\),最后绕z轴旋转 \(\gamma\),求球坐标机器人的运动变换矩阵。
解: \[ \begin{aligned} P&=\mathrm{Rot}\left( z,\gamma \right) \cdot \mathrm{Rot}\left( y,\beta \right) \cdot \mathrm{Trans}\left( 0,0,r \right) \\ &=\left[ \begin{matrix} \cos \gamma& -\sin \gamma& 0& 0\\ \sin \gamma& \cos \gamma& 0& 0\\ 0& 0& 1& 0\\ 0& 0& 0& 1\\ \end{matrix} \right] \cdot \left[ \begin{matrix} \cos \beta& 0& \sin \beta& 0\\ 0& 1& 0& 0\\ -\sin \beta& 0& \cos \beta& 0\\ 0& 0& 0& 1\\ \end{matrix} \right] \cdot \left[ \begin{matrix} 1& 0& 0& 0\\ 0& 1& 0& 0\\ 0& 0& 1& r\\ 0& 0& 0& 1\\ \end{matrix} \right] \end{aligned} \]
