【工业机器人】第二次作业
直接搬了老师给的参考答案,做了部分修改。
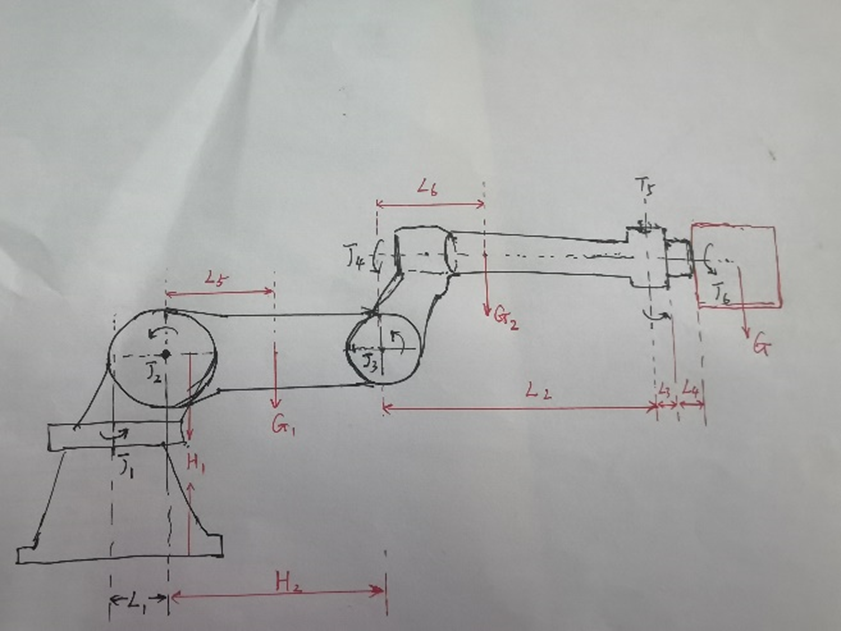
1. 课本P66-68,参考J1和J2轴的电机、减速机校核方法,计算J3轴、J4轴的最大负载转矩和最大负载惯量,并从转速、转矩和惯量三方面校核J3和J4轴电机、减速机的选型结果。(J4轴只需校核转速和转动惯量,不需要计算和校核转矩。校核J4轴转动惯量时,假设小臂质量G2集中在绕J4轴半径为70mm的圆周上。)
(1)核算J3轴
J3 轴电机直接驱动J3轴减速器带动小臂俯仰。减速器减速比\(i=80\)。
(a)核算转速要求
J3轴减速器输出给小臂的额定转速=2000/80×6=150 ((°)/s)
J3轴减速器输出给小臂的最高转速=3000/80×6=225 ((°)/s)
J3轴减速器带动小臂转动性能参数中要求最大转速为 163(°)/s。
J3轴减速器输出给小臂的最高转速大于性能参数的最高转速设计值,满足转速要求。
(b)核算负载要求
J3轴受到的最大负载转矩:$ M=G_2gL_6+Gg( R-H_2 ) =616 , $
J3轴电机的输出转矩为14.3Nm,经减速器放大后的输出给小臂的转矩14.3×80=1144 Nm,大于受到的最大负载转矩,满足要求。
(c)核算转动惯量要求
J3轴受到的最大负载转动惯量:$ J_3=G_2^2+G( R-H_2 ) ^2=55.1 ,^2 $
J3轴电机转子转动惯量为\(14\times 10^{-4} \,\mathrm{kg·m}^2\),减速器减速比为80,经减速器后J3轴输出的转动惯量为\(14\times 10^{-4}\times 80^2=8.96 \,\mathrm{kg·m}^2\)。
J3轴受到的最大负载转动惯量与输出转动惯量比值为 55.1/8.96=6.1,小于选用的松下 MDME502S1H 伺服电机推荐的惯量比值 10,输出惯量满足要求。
(2)核算J4轴
J4轴电机通过齿轮啮合(减速比 65:38)驱动 J4 轴减速器带动小臂回转,综合减速比$ i=65/38=51.7 $。
(a)核算转速要求
J4轴减速器输出给小臂的额定转速=2 000/51.7×6=232 ((°)/s)
J4轴减速器输出给小臂的最高转速=3 000/51.7×6=348 ((°)/s)
J4轴减速器带动小臂转动性能参数中要求最大转速为 230(°)/s。
J4轴减速器输出给小臂的最高转速大于性能参数的最高转速设计值,满足转速要求。
(b)核算负载要求
J4轴受到的最大负载不影响J4轴的回转,不需核算J4轴的输出转矩,必然满足要求。
(c)核算转动惯量要求
J4轴受到的最大负载转动惯量(回转惯量),假设不考虑末端载荷的尺寸,则:\(J_4=G_2\times r^2=50\times 0.07^2=0.245 \,\mathrm{kg}\cdot \mathrm{m}^2\)
J4轴电机转子转动惯量为\(7.9 \times 10^{-4}\,\mathrm{kg·m}^2\),减速器减速比为51.7,经减速器后J4轴输出的转动惯量为\(7.9\times 10^{-4}\times 51.72=2.115 \,\mathrm{kg·m}^2\)
J4轴受到的最大负载转动惯量与输出转动惯量比值为 0.245/2.115=0.116,远小于选用的松下 MDME502S1H 伺服电机推荐的惯量比值10,输出惯量满足要求。
2. 按照国标GB/T 12642-2001,工业机器人的性能指标规定的位置准确度,给定工业前几任一个指令位置P c点为(12,34,25),以激光跟踪仪为测量工具,测出10组实到位置数据,如下表,求出位置准确度AP p。
| j | \(X_j\) | \(Y_j\) | \(Z_j\) |
|---|---|---|---|
| 1 | 12.001 | 33.997 | 24.996 |
| 2 | 11.98 | 33.989 | 24.989 |
| 3 | 12.010 | 34.002 | 24.993 |
| 4 | 12.011 | 34.007 | 25.004 |
| 5 | 12.003 | 33.992 | 25.010 |
| 6 | 12.007 | 33.995 | 25.001 |
| 7 | 12.013 | 33.998 | 24.999 |
| 8 | 11.999 | 34.005 | 25.012 |
| 9 | 11.986 | 34.010 | 25.007 |
| 10 | 11.995 | 34.009 | 25.008 |
$ {X}=_{j=1}^n{X_j}=12.0005 $
$ {Y}=_{j=1}^n{Y_j}=34.0004 $
$ {Z}=_{j=1}^n{Z_j}=34.0004 $
此处{X}不知道为什么渲染不出来。
\[ AP_{\mathrm{p}}=\sqrt{(\bar{X}-X_c)^2+(\bar{Y}-Y_c)^2+(\bar{Z}-Z_c)^2}=\sqrt{0.0005^2+0.0004^2+0.0019^2}=0.002 \] 注:关于转速,实际应用中一般低于设计的最高转速运行。
