【工业机器人】第一次作业
1. \(U=6i+4j+3k\),绕\(Z\)轴转90度后,再绕\(Y\)轴转90度,在上述基础上再平移\((3,-1,5)\)。用齐次坐标变换求此矢量,并写出计算过程。
设$^0P=( 6,4,3 ) $,由题可知
\[ \begin{aligned} ^iP&=Trans\left( 3,-1,5 \right) \cdot Rot\left( Y,90\degree \right) \cdot Rot\left( Z,90\degree \right) \cdot ^0P \\ &=\left[ \begin{matrix} 1& 0& 0& 3\\ 0& 1& 0& -1\\ 0& 0& 1& 5\\ 0& 0& 0& 1\\ \end{matrix} \right] \left[ \begin{matrix} \cos 90\degree& \sin 90\degree& 1& 0\\ 0& 1& 0& 0\\ -\sin 90\degree& \cos 90\degree& 0& 0\\ 0& 0& 0& 1\\ \end{matrix} \right] \left[ \begin{matrix} \cos 90\degree& -\sin 90\degree& 0& 0\\ \sin 90\degree& \cos 90\degree& 0& 0\\ 0& 0& 1& 0\\ 0& 0& 0& 1\\ \end{matrix} \right] \left[ \begin{array}{c} 6\\ 4\\ 3\\ 1\\ \end{array} \right] \\ &=\left[ \begin{array}{c} 6\\ 5\\ 9\\ 1\\ \end{array} \right] \end{aligned} \]
2. 下图机器人为一个二连杆机器人。因为有一个转动关节和一个移动关节,因此有时称该机器人为PR机构。为此机器人建立连杆坐标系并写出其D-H参数。
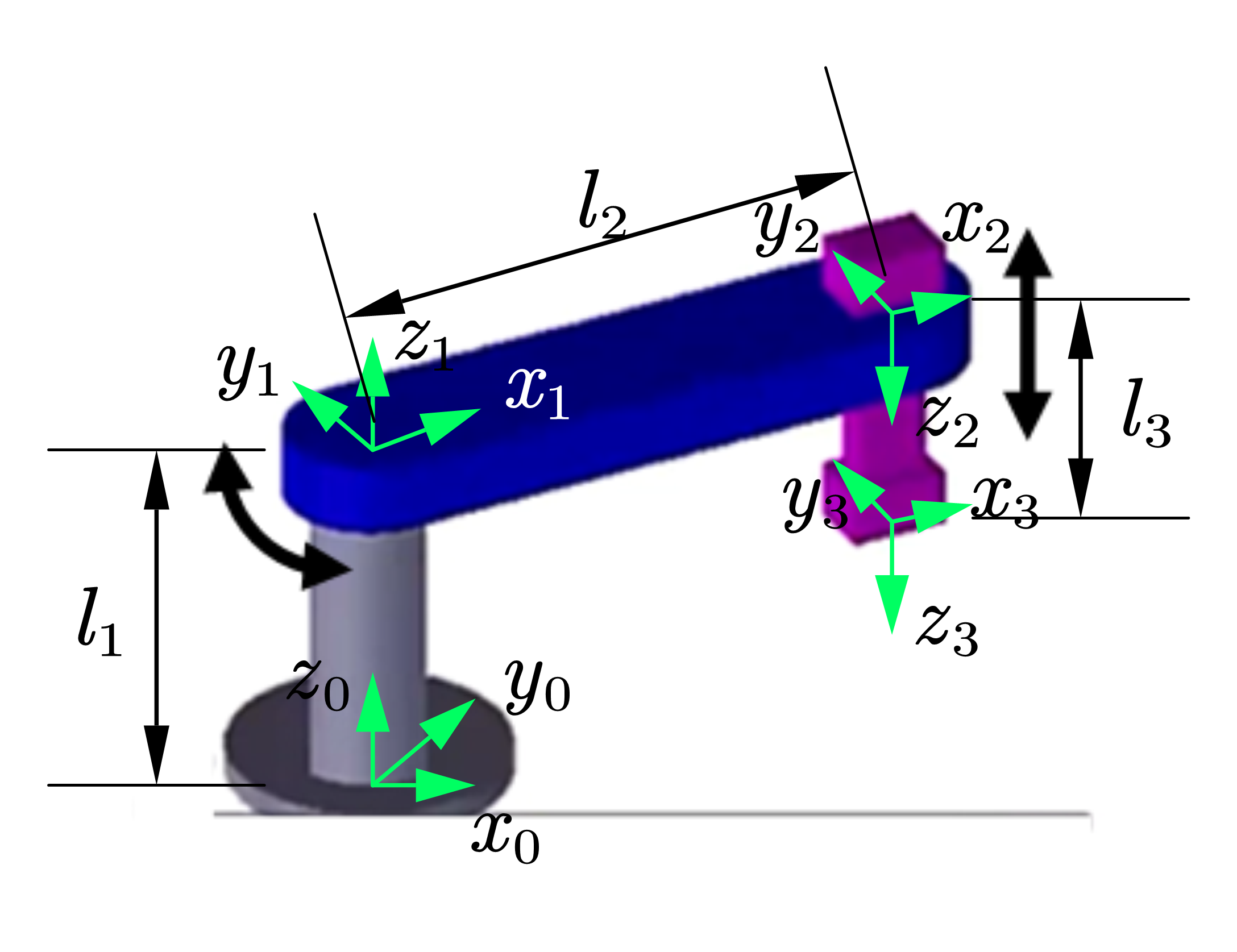
建立如图坐标系。
| \(i\) | \(a_i/\mathrm{m}\) | \(\alpha _i/\left( \degree \right)\) | \(d_i/\mathrm{m}\) | \(\theta _i/\left( \degree \right)\) |
|---|---|---|---|---|
| 1 | 0 | 0 | \(l_1\) | \(\theta _1\left( 0\degree \right)\) |
| 2 | \(l_2\) | \(180\degree\) | 0 | 0 |
| 3 | 0 | 0 | \(l_3(0)\) | 0 |
