【工业机器人】第三次作业
一、填空题
控制系统按照不同的准则可分为多种类型,按照有无反馈环节可分为3类: 开环控制系统、
闭环控制系统和复合控制系统。伺服控制是机器人的底层控制器,主要用来控制机器人电机转动,从而实现关节运动。目前机器人伺服控制模式主要有3种:力控制、
速度控制和位置控制。工程界对控制系统性能好坏的评价,主要有3个方面的基本要求:
稳定性、准确性和快速性。这3个方面的要求中,稳定性是控制系统正常工作的首要条件。工业机器人的驱动系统按照动力来源基本上可分为3类:液压驱动、
电机驱动和气动驱动。其中,由于控制精度高、能精确定位、反应灵敏,从而在中小负载、要求具有较高的位置控制精度、较高速度的机器人领域广泛应用的驱动系统是哪一个:电机驱动。机器人控制系统的构成主要包括2个功能单元:示教盒和
控制柜。在机器人电控系统的设计中,“PC+运动控制器”的结构是主流的运动控制层解决方案,这种结构以
工控机为平台,以开放式可编程运动控制器为控制核心。
二、简述题
1. 写出PID控制器的控制规律方程和传递函数,并简述各控制项和常数。
答:(1)控制规律方程 \[ m\left( t \right) =K_{\mathrm{P}}\left[ e\left( t \right) +\frac{1}{T_{\mathrm{I}}}\int_0^t{e\left( t \right) \mathrm{d}t}+T_{\mathrm{D}}\frac{\mathrm{d}e\left( t \right)}{\mathrm{d}t} \right] \] (2)传递函数 \[ G\left( s \right) =K_{\mathrm{P}}\left( 1+\frac{1}{T_{\mathrm{I}}s}+T_{\mathrm{D}}s \right) \] 其中,$K_{}e( t ) $ 为比例控制项;\(K_{\mathrm{P}}\) 为比例系数;\(\frac{1}{T_{\mathrm{I}}}\int_0^t{e\left( t \right) \mathrm{d}t}\) 为积分控制项;\(T_{\mathrm{I}}\) 为积分时间常数;\(T_{\mathrm{D}}\frac{\mathrm{d}e\left( t \right)}{\mathrm{d}t}\) 为微分控制项;\(T_{\mathrm{D}}\) 为微分时间常数。
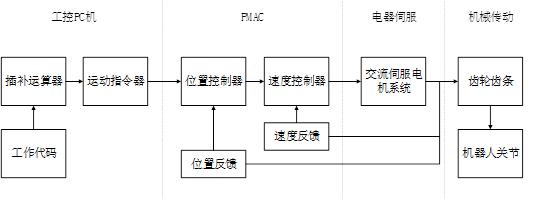
2. 机器人电控系统采用“PC+运动控制器”的结构,工控机为上位机,运动控制卡PMAC为速度和位置控制器,若电气伺服采用交流伺服电机驱动,机械传动采用高精度齿轮齿条实现机器人关节的进给运动。请画出任意一个关节运动的控制系统的逻辑结构图。
答: 如图所示。